Валкодер - RX3DCZ_new
Главное меню
Валкодер
Во многих моих конструкциях, для управления, применяется механический энкодер. Основное достоинство его -
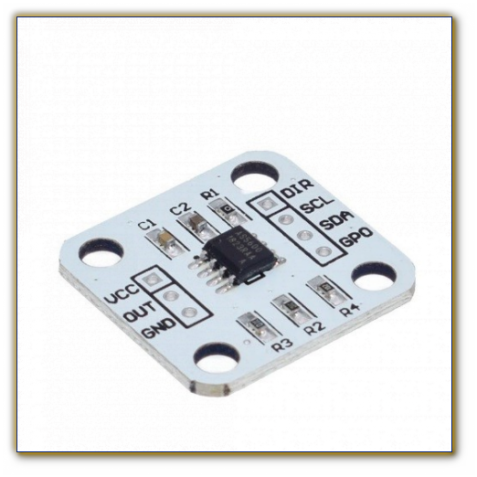
На AliExpress я приобрел готовый модуль на AS5600
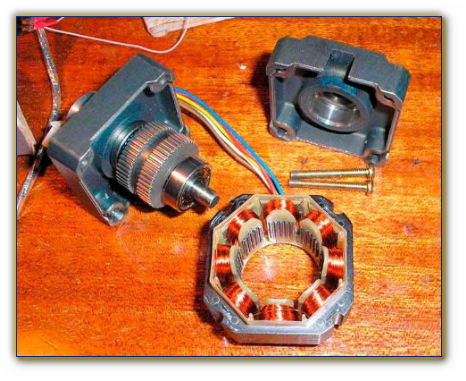
разобрал шаговый двигатель от дисковода 5.25”
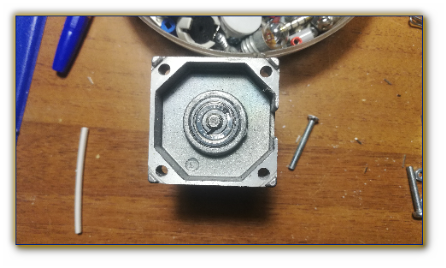
Для дальнейшей сборки потребуется макетная плата, обрезанная по внешнему размеру двигателя и с просверленными отверстиями для крепежа. С оси двигателя демонтируется всё, кроме переднего, и она обрезается в один уровень с ним. В моем случае ось была из нержавейки. На место среза клеится магнит пришедшей вместе с модулем AS5600.В модуль вставляются идущие в комплекте разъемы -
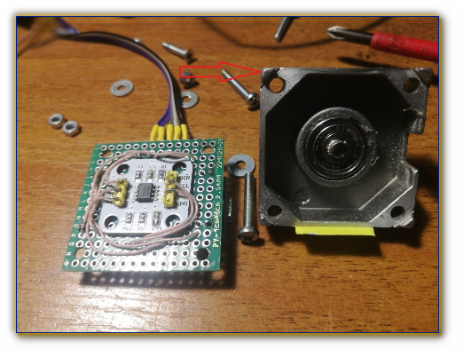
Очень важно, чтобы плата модуля установилась вплотную к макетке. Она опирается на выступы, которые указаны стрелкой.
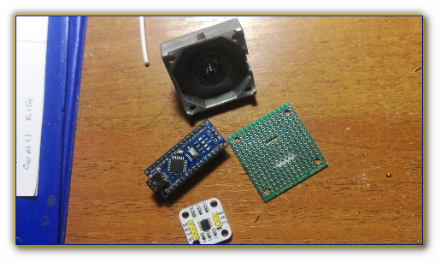
Arduino Nano монтируется с другой стороны монтажной платы так, чтобы контакты модуля оказались между линеек контактов Arduino. На линейках оставляю только крайние пины, они впаиваются в монтажную плату, остальные откусываю. Монтаж навесной.
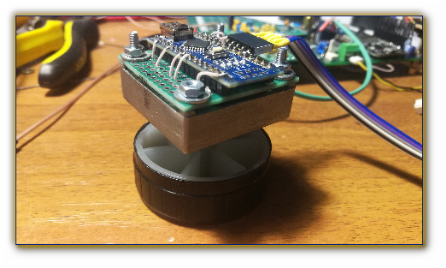
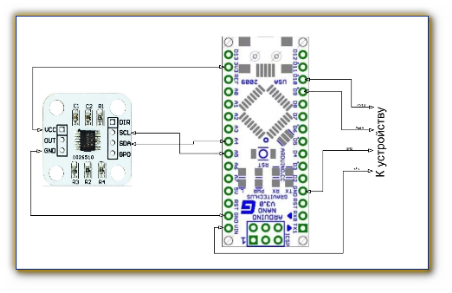
Схема подключения и актуальная версия скетча